




SCALING HIGH-POWER ELECTRONICS: SYNCHRONIZED MULTI-MODULE ARCHITECTURE
In high-power drive systems, the real challenge is not merely achieving the required power level: it is doing so whilst maintaining reliability, configuration flexibility, and keeping system costs under control. Working on applications that push the limits of traditional inverters, we have developed an approach that starts with a different question: instead of designing a larger converter each time, how can we get multiple lower-power conversion units to work together precisely?
From two inverters in parallel to multi-module conversion systems
The starting point was a specific case: a dual three-phase SM-PMSM (Surface-Mounted Permanent Magnet Synchronous Motor), ~250 kW, switching frequency 8 kHz. The solution we chose was to operate two 180 kVA inverters in parallel, managed by a dual-board Master-Slave control system. In this architecture, the Master board collects status feedback from the Slave, calculates the control references for both converters, and transmits them to the Slave via a proprietary high-frequency communication system. The Slave board receives the references and closes its own control loop independently. The result is a synchronous and coordinated multi-module conversion system, capable of delivering up to 360 kVA by reusing existing hardware — without having to develop a larger converter from scratch.
This proprietary architecture applies to both electric drives with multi-phase motors (6-phase, 2×3) and high-power configurations (> 1 MW) requiring more than two modules in parallel. The benefits are not limited to scalability: the use of identical modules introduces hardware redundancy — in the event of a unit failure, the system can continue to operate at reduced power — and reduces the overall cost compared to large monolithic converters, especially above 0.5 MW.
The “bottleneck” that traditional architectures cannot solve
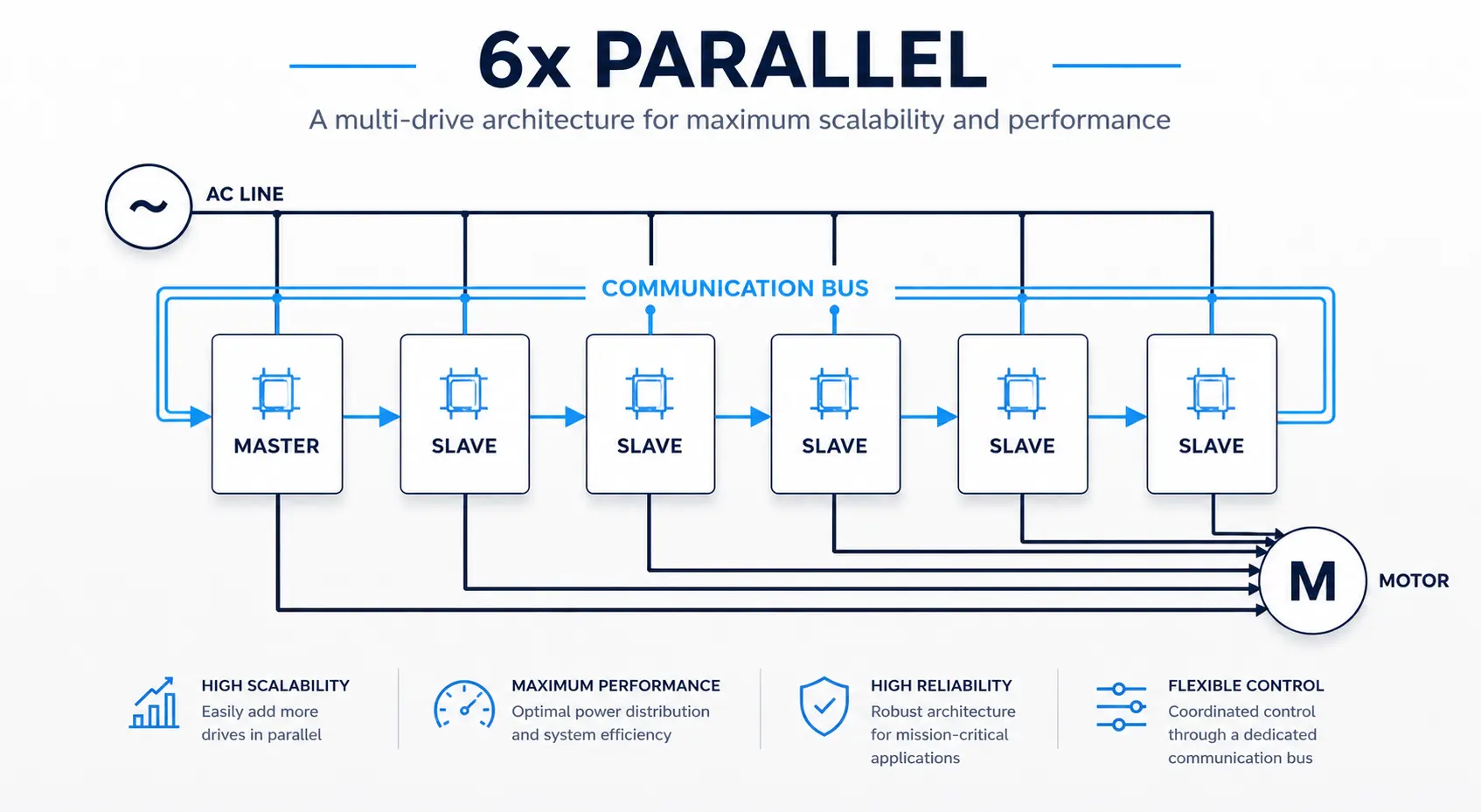
However, parallelizing multiple inverters is not technically straightforward. The central issue is not power: it is the synchronization of multi-module communication. In a classic master/slave architecture, the master must open a dedicated communication channel to each slave. Even with just six modules, this centralized node becomes the bottleneck of the entire system: N hardware ports and N bidirectional channels are required, the master is a specialized component that cannot be interchanged with the slaves, and adding or removing modules requires a hardware redesign.
The question we asked ourselves was: how could a parallel system be scaled beyond two modules without complexity increasing exponentially? The answer was a ring-bus topology, with a single master and multiple slaves, in which each module has just two unidirectional ports — one for receiving and one for transmitting. This is the architecture on which we built our proprietary solution.
Distributed synchronous communication: Prima Electro’s proprietary solution.
The high-frequency communication system we have developed operates up to the switching frequency of the converters, enabling N inverters to be connected in parallel without the constraints of centralized architecture. The distinction between Master and Slave is only at the firmware level: the hardware is identical for all modules, allowing for in-field reconfigurations and scalable provisioning without modifying the cabling.
The critical technical challenge is synchronization jitter: all output stages must switch with the same timing reference to ensure synchronous PWM and preserve the benefits of simultaneous switching between the conversion cells. With the solution developed by Prima Electro, the propagation jitter of the timing reference is negligible compared to the switching period. Communication takes place via a galvanically isolated differential line or fiber optic link, to minimize EMI coupling, using a commercial microcontroller and dedicated firmware. The solution is patent pending.
Related news
What makes us what we are


